 |
Наше программное обеспечение (ПО)
Основные направления нашей деятельности в сфере ПО
-Разработка компьютерного программного обеспечения (для ПК и промышленных компьютеров, микропроцессоров и систем реального времени)
-Деятельность по созданию и использованию баз данных и информационных ресурсов
-Разработка ПО и ПАК, алгоритмов и программ ИИ, производство систем управления реального времени и операционных систем, разработка и производство робототехники для различных сфер применения.

Управление станками
Мы решили задачу универсализации управления станками. Это позволяет заменить уникальные программы и контроллеры ЧПУ на программы и программно-аппаратные комплексы (ПАК) общего применения.
Стоимость программного обеспечения 4 000 000 руб.
-ПО InformixIII управления 3х осевым станком:
процессор RISC, например, Atmega16 (Atmel, 16К флэш память, 512 байт РЕПРОМ, 1К ОЗУ,
выводы портов 32)
программа написана на ассемблере
внешних прерываний не ограничено (демо 3 - используется 1 : кнопка пуска)
таймеры - не ограничено (демо 3 - не используются)
расчетное время реакции 1 мкс (прерывание) - расчетно
САА (HAL) слой аппаратных абстракций
аппаратная платформа: например, STK500;
компмлятор внешний: Atmel avr Studio4 (или подобный)
загрузчик внешний: STK500 (или подобный)
Структура ПО ОС РВ: 4 модуля: m16def.inc (или др., в засисимости от процессора - программа общего пользования) - константы процессора, pmem.inc-распределение памяти, pmini.inc-инициализация, pm.asm-микроядро.
Пользовательские приложения: отдельный модуль в файле app.inc
ОС: таймеры, прерывания (внешние, таймеров, обмена), планировщик заданий и управление процессами, управление пямятью, управление потоками, межпроцессный обмен
микроядро: планировщик, таймеры, прерывание, управление (пямятью, потоками, процессами), межпроцессные сообщения
планировщик ОС РВ: от 18байт, FIFO
потоков: 1
демо: универсальная плата "ПМ5" собственной разработки, задействовано 11 портов микроконтроллера
Видеоматериал испытаний демо-версии << нажать для просмотра
Информация для установки и эксплуатации ПО:
оплатить программу, получить ссылку на скачивание, скачать файл, загрузить его в микроконтроллер с помощью программатора, например, STK500. Файл запускается автоматически при включении питания или перезагрузке микроконтроллера.
Документация для установки и эксплуатации ПО (нажать для скачивания):
Инструкция по установке экземпляра программного обеспечения.
Инструкция по эксплуатации.
Описание процессов жизненного цикла ПО.
Функциональные характеристики ПО.
Скачать демо файл программы : нажать для скачивания<<
Описание функциональных характеристик ПО
- Назначение программы
Программа решает задачи управления комплексами реального времени, содержащими шаговые двигатели, датчики,
например, станков с ЧПУ или роботов. Целью использования программы является замена уникальных контроллеров ЧПУ на процессорные системы общего применения.
- Функции программы
-считывание информации датчиков,
-управление приборами, в том числе, шаговыми двигателями позиционирования рабочих элементов станка,
- Архитектура программы
Программа выполнена на основе архитектуры, изображенной на рисунке
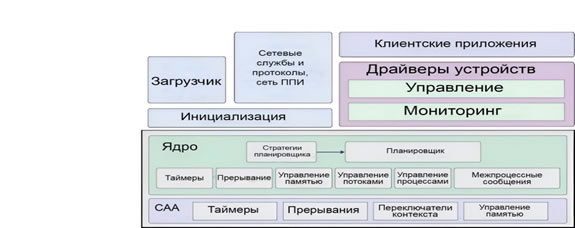
Здесь САА (HAL) - слой аппаратных абстракций
Программа написана на ассемблере
- Ресурсы для работы
Процессор RISC, например:
1887ВЕ7Т (НИИЭТ, 128 кбайт флэш память, 4 кбайт РЕПРОМ, 4 кбайт ОЗУ, выводы портов 53 )- аналог Atmega128/103 (фирма Atmel),
или Atmega2560 (фирма Atmel, 256 кбайт флэш память, 4 кбайт РЕПРОМ, 8 кбайт ОЗУ, выводы портов 86, ток на один вывод не более 40 мА),
аппаратная платформа: например, STK500/600, КФДЛ.301411.243;
компилятор внешний: Atmel avr Studio4 (или подобный),
вход USB ATmega16U2 (или подобный),
загрузчик внешний: STK500/600 (или подобный),
таймеры – 4.
Демо-версия программы предназначена для пользовательского приложения управления 2х осевым станком (два ШД).
- Основные характеристики программы:
-время реакции датчика 1 мкс (прерывание) – расчетно,
-непрерывный опрос датчиков в режиме ожидания,
-прием управляющих воздействий от входов датчиков,
-плавный пуск ШД по внешнему воздействию в заданном направлении с остановом через программируемое количество шагов,
Демо: процессорная плата с мк Atmega2560 и шилд-плата собственной разработки, задействовано:
-выходы управления ШД (знак, пуск, импульсы шагов) – для двух ШД,
- кнопка пуска на входе датчиков.
6. Результаты работы программы демонстрируются на видео:
демо-версия << нажать для просмотра
Инструкция по установке программного обеспечения
1. ТЕРМИНЫ, СОКРАЩЕНИЯ И ОПРЕДЕЛЕНИЯ
В настоящем документе применены следующие сокращения и термины с соответствующими определениями:
мк микроконтроллер
ОС Операционная система
Программа Программа InformixIII
Платформа Аппаратная платформа с мк Risc для работы Программы, например, STK500, либо рабочая плата заказчика,
Демо платформа - сборка плат собственной разработки
ПО Программное обеспечение
2. ВВЕДЕНИЕ
2.1. Назначение документа
Данный документ содержит последовательность действий и указания по установке/обновлению экземпляра Программы для его использования, в том числе для приемки и экспертизы
2.2. Краткое описание возможностей Программы
2.2.1 Назначение и область применения
Программа предназначена для управления комплексами реального времени, содержащими шаговые и линейные двигатели, датчики, например, для станков с ЧПУ или роботов, в аппаратной платформе на базе микропроцессора Risc, например, 1887ВЕ7Т (НИИЭТ), Amega103/128/2560(Atmel) или подобными.
2.3. Требование к безопасному использованию
Для исключения возможности влияния на систему извне используются следующие средства:
Сборка конечной системы из исходного кода происходит в контролируемом окружении. На платформу эксплуатации программа попадает только в виде бинарных файлов.
На платформе эксплуатации запрещены и отсутствуют любые средства компиляции из исходного кода
3. ОПИСАНИЕ УСТАНОВОК
3.1. Подготовка экземпляра Программы для установки
3.1.1. Программа поставляется в виде бинарного (hex) файла, либо в заархивированном виде. В последнем случае программа должна быть разархивирована.
Наименование файла Программы включает ее название в латинской транскрипции informix3 и название версии, например, informix3-fl002.hex
3.1.2. По заказу покупателя программа может поставляться в исходных кодах (ассемблер).
3.1.3. Ссылка для скачивание программ предоставляется по запросу на электронную почту: kbinfo@mail.ru .
3.2. Установка (прошивка) программы в целевой мк
производится с использованием стандартных инструментальных средств, в том числе:
-для мк 1887ВЕ7Т - платформа (USB-программатор КФДЛ.301411.247 или макетно-отладочная плата КФДЛ.301411.243 НИИЭТ)
по инструкции
https://niiet.ru/wp-content/uploads/debugging.pdf
-для мк Amega103/128/2560 - платформа (отладочная плата Atmel STK 500)
по инструкции
https://static.chipdip.ru/lib/225/DOC000225200.pdf (англ)
http://www.gaw.ru/html.cgi/txt/app/Atmel/micros/avr/stk500/index.htm
Инструкция может быть предоставлена по запросу на электронную почту: kbinfo@mail.ru .
Прошивка файла Программы производится во встроенную флэш память микроконтроллера.
Для прошивки можно использовать программу avrdude (см https://github.com/mariusgreuel/avrdude),
список команд программы
https://dmr.md/upload/uploads/avrdude-1.pdf
Примеры командной строки для установки (прошивки) программного обеспечения:
А) Для Windows команда и аргумент для прошивки микроконтроллера имеют вид:
Command
"path\avrdude.exe"
Argument
-C"path2\avrdude.conf" -pmc -cwiring -l"path3\ard.log" -v -P\\.\COMn -b115200 -D -Uflash:w:"path4\ informix3-fl002.hex ":a
где обозначено
path - директория команды avrdude.exe
path2 - директория файла конфигурации avrdude.conf
path3 - директория лог файла ard.log для avrdude
path4 - директория прошиваемого файла, например, informix3-fl002.hex
COMn - номер последовательного порта платы с прошиваемой микросхемой, например, COM1
mc - обозначение микроконтроллера, например, m2560 для atmega2560, m16 для atmega16 (см выше список команд avrdude).
Б) Для Windows прошивка программы через программатор ArduinoISP (см https://docs.arduino.cc/built-in-examples/arduino-isp/ArduinoISP),
обозначения те же:
"path\avrdude.exe" -C"path2\avrdude.conf" -pmc -c avrisp -b 19200 -l"path3\ard.log" -P comN -Uflash:w:informix3-fl002.hex:i
В) Для Линукс скрипт прошивки через USB порт (обозначения те же):
avrdude -pmc -cwiring -l /path3/ard.log -P /dev/ttyN -v -D -U flash:w:/path4/informix3-fl002.hex:a
где /dev/ttyN - имя устройство связи, присвоенное системой плате прошивки (например, ttyS0, ttyACM0...) - вы можете его узнать с помощью команды dmesg после подключения платы.
Результаты выполнения операции вы увидите в лог-файле, имя которого вы указали в строке (аргументе) программы avrdude.
3.3. Работа программного обеспечения
Для работы мк с установленной программой должен быть установлен на Платформу/Демо платформу.
Программа запускается/перезапускатся автоматически:
- после окончания установки (прошивки),
- после подачи питания на мк,
- после перезапуска программы сигналом Reset мк согласно паспорту мк.
4. Требования к обеспечению надежного функционирования программы
Надежное (устойчивое) функционирование программы должно быть обеспечено выполнением заказчиком совокупности организационно-технических мероприятий, перечень которых приведен в Инструкции по эксплуатации ПО.
Со стороны разработчика предоставляется возможность аппаратной защиты мк (по запросу на электронную почту: kbinfo@mail.ru )
5. Обновление программы
Прошивка новой версии Программы (обновление) производится также, как описано в разделе 3 настоящей Инструкции.
Количество обновлений ограничивается значением, указанным в паспорте мк (10000 для 1887ВЕ7Т, Atmega103/128/2560)
6. Контакты технических специалистов, которые могут
проконсультировать по процессу развёртывания и настройки
экземпляра ПО и его функционирования:
Щербаков Данила, системный аналитик ООО «КБИнфо», тел.+7(920)965-62-97, почта kbinfo@mail.ru
Инструкция по эксплуатации ПО
1 Назначение документа
Данный документ содержит основные требования к ПО, описание компонентов ПО, указания на нахождение экземпляра ПО для его установки в мк, в том числе с целью приемки или экспертизы, особенности установки, настройки, поддержки, восстановления, совершенствования и обновления Программы.
2. Основные требования
2.1 Назначение и область применения
Программа предназначена для управления комплексами реального времени, содержащими шаговые двигатели, датчики, например, для станков с ЧПУ или роботов.
2.2 Требования к функциональным характеристикам
Программа обеспечивает возможности выполнения перечисленных ниже функций:
-инициализацию,
-прием команд от внешних систем, в том числе пользовательского ПК,
-считывание информации датчиков,
-управление приборами, в том числе, шаговыми двигателями позиционирования рабочих элементов станка / робота.
2.3. Требование к эксплуатирующему персоналу
Для установки, настройки, восстановления, совершенствования и обновления Программы и всех ее компонентов эксплуатирующий персонал (системный инженер) должен обладать опытом работы с инструментальными платформами и мк на уровне системного инженера.
2.4. Требование к безопасному использованию
Для исключения возможности влияния на систему извне используются следующие средства:
Сборка конечной системы из исходного кода происходит в контролируемом окружении. На платформу эксплуатации программа попадает только в виде бинарных файлов.
На платформе эксплуатации запрещены и отсутствуют любые средства компиляции из исходного кода и средства дизассемблирования.
Для обеспечения ИБ рекомендуется использовать аппаратную защиту мк, при ее наличии в мк (биты lock для мк Atmega, 1887ВЕ7Т и подобных).
2.5.Состав ПО
2.5.1. Программа поставляется в виде бинарного (hex) файла, либо в заархивированном виде. В последнем случае программа должна быть разархивирована.
Наименование файла Программы включает ее название в латинской транскрипции informix3 и название версии, например, informix3-fl002.hex
Ссылка для скачивания экземпляра ПО
http://www.kbinfo.ru/ufakbinfo/it.htm#robo_hex1
кнопка «Скачать файл программы»,
= файл программы http://www.kbinfo.ru /ufakbinfo/informix3-fl002.hex
2.6. Установка экземпляра ПО
Установка ПО описана в документе «Инструкция по установке экземпляра программного обеспечения»
3. Работа ПО
Для работы микроконтроллер с установленной программой должен быть установлен на Платформу/Демо платформу.
Программа запускается/перезапускатся автоматически:
- после окончания установки (прошивки),
- после подачи питания на мк,
- после перезапуска программы сигналом Reset мк согласно паспорту мк.
После запуска ПО в штатном режиме действия персонала не требуются.
Дальнейший порядок работы программы и ее завершения определяется установленным пользовательским приложением.
Для ПО в тестовом режиме управление Программой производится нажатием кнопки на демо-платформе:
– пуск демо-цикла двух ШД – вращение в одну стороны (примерно 2 сек), затем вращение в другую сторону (примерно 2 сек) и останов.
Повторное нажатие на кнопку после останова ШД повторяет цикл.
4. Требования к обеспечению надежного функционирования Программы
Надежное (устойчивое) функционирование Программы должно быть обеспечено выполнением заказчиком совокупности организационно-технических мероприятий, перечень которых приведен ниже:
организацией бесперебойного питания технических средств;
регулярным выполнением рекомендаций Министерства труда и социального развития РФ, изложенных в Постановлении от 23 июля 1998 г. Об утверждении межотраслевых типовых норм времени на работы по сервисному обслуживанию ПЭВМ и оргтехники и сопровождению программных средств»;
регулярным выполнением требований ГОСТ 51188-98. Защита информации.
Со стороны разработчика:
- обновления программы;
- восстановление (перезапуск) системы,
- предоставление возможности аппаратной защиты мк (по запросу на электронную почту: kbinfo@mail.ru )
5. В связи с необходимостью специализированного оборудования для проведения приемки или экспертизы Программы (аппаратная среда загрузки и исполнения) на сайте http://www.kbinfo.ru/ufakbinfo/
размещен видеоматериал http://www.kbinfo.ru/ufakbinfo/testdemoinformix.mp4 испытаний в тестовом режиме (скачивается по ссылке http://www.kbinfo.ru/ufakbinfo/it.htm#robo_test_demo
нажатием на копку «Видеоматериал испытаний версии << в тестовом режиме - нажать для просмотра»).
Кроме того, имеется возможность удаленного присутствия при испытании по предварительному согласованию по тф +7(920)965-62-97 в рабочие дни с 8:00 до 14:00.
Описание процессов жизненного цикла
Дж Фокс в книге Программное обеспечение и его разработка. М., Мир, 1985г. выделяет три фазы ЖЦ ПО
-разработка
-использование
-сопровождение (продолжающаяся разработка)
Структура ЖЦ ПО в соответствии со стандартом ISO/IEC 12207 базируется на трех группах процессов (см рис.)
· основные процессы ЖЦ ПО (приобретение, поставка, проектирование, разработка, эксплуатация, сопровождение);
· вспомогательные процессы, обеспечивающие выполнение основных процессов (документирование, управление конфигурацией, тестирование и обеспечение качества, верификация, аттестация, оценка, аудит, поддержка версий и доработка, решение проблем и устранение сбойных ситуаций);
· организационные процессы (управление проектами, создание инфраструктуры проекта, определение, оценка и улучшение самого ЖЦ, обучение и квалификация персонала).
Процесс разработки включает следующие действия:
1) анализ требований к системе;
2) проектирование архитектуры системы;
3) анализ требований к ПО;
4) проектирование архитектуры ПО;
5) детальное проектирование ПО;
6) кодирование и тестирование ПО;
7) интеграцию ПО;
8) квалификационное тестирование ПО;
9) интеграцию системы;
10) квалификационное тестирование системы;
11) установку ПО;
12) приемку ПО.
ЖЦ компьютерной программы охватывает три фазы ЖЦ ПО
-разработка
-использование
-сопровождение (продолжающаяся разработка, устранение сбойных ситуаций и доработка, усовершенствование)
Это отражено в документах разработки:
-техническое задание
-инструкция по установке
-инструкция по эксплуатации,
включающих описание процессов, обеспечивающих поддержание жизненного цикла программного обеспечения, в том числе, загрузку,
устранение неисправностей, выявленных в ходе эксплуатации программного обеспечения, совершенствование программного обеспечения, а также информацию о персонале, необходимом для обеспечения такой поддержки.
Информация об устранении неисправностей, выявленных в ходе эксплуатации программного обеспечения:
неисправности, выявленные в ходе эксплуатации программного обеспечения, устраняются разработчиком по заявке на электронный адрес kbinfo@mail.ru c отправкой исправленной версии программы в адрес заявителя и её установкой заявителем согласно п.3.2 Инструкции по установке программного обеспечения.
Информация о совершенствовании ПО:
новые версии ПО направляются на электронный адрес лица (организации), эксплуатирующего ПО, и устанавливаются согласно п.5 Инструкции по установке программного обеспечения.
- Сведения о персонале организации, осуществляющей
совершенствование ПО, устранение неисправностей (сбойных ситуаций) и техподдержку
Инфраструктура разработки и обновления ПО, размещение разработчиков и службы поддержки находятся в ООО «Комтоп» по адресу:
Рязань, ул. Ленинского Комсомола, 93, тел. 8(4912)98-43-79
Стоимость программного обеспечения 4 000 000 руб.
|
 |


